









-
当下市场对仿人机器人的认知仍有重大偏差
价值投机小学生
 / 2022-08-15 10:18 发布
/ 2022-08-15 10:18 发布近年来
, 。 日前
, , 。 。 中信建投证券分析师朱玥
、 , 。 两位分析师认为
, , 。 但无论是从研发设计角度
, , , 、 、 、 。 他们表示
, , : “ 仿人机器人涉及工程学和控制科学, 、 、 , 。 , 。 ” 仿人机器人的技术构思
一个普通成年人一般具有206块骨骼和近230个关节
, 。 如果对人体精确建模
, , , , 、 、 、 、 、 、 。 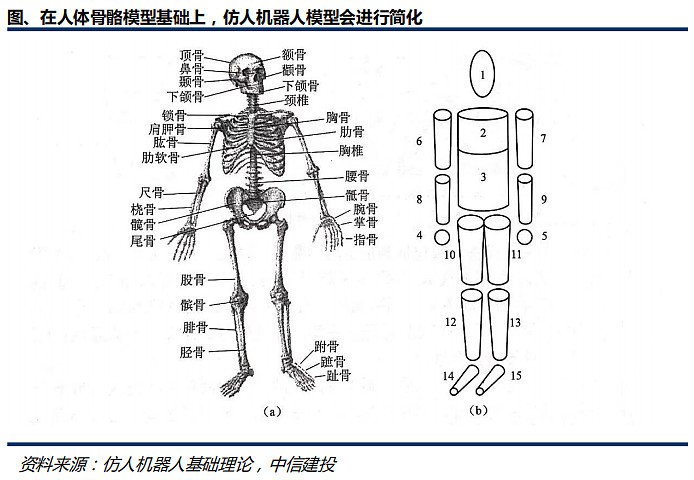
仿人机器人是一种具有高自由度
、 , 。 , , 。 仿人机器人不仅具有人体的部分外形
, 、 , 。 在仿生机构设计过程中
, , , , 。 通常使用传感器完模拟人对环境的感知
, 、 、 、 , 。 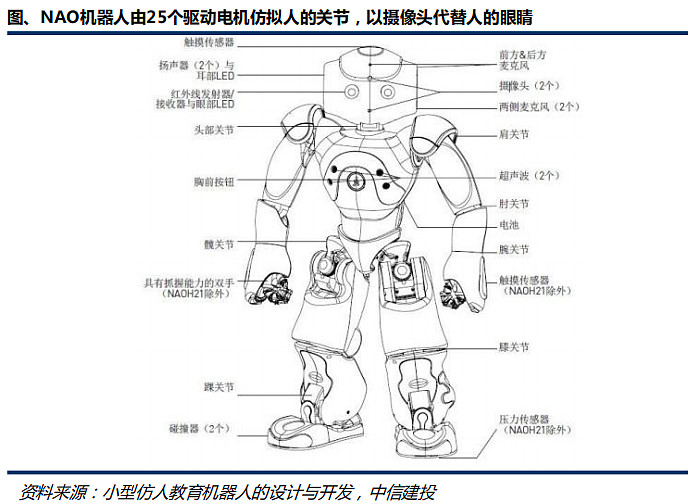
以中小型仿人机器人NAO为例
, 、 、 、 、 、 。 NAO机器人由法国的Aldebaran Robotics公司推出
, , , 、 , 。 , 。 关节驱动三条技术路线
: 电机驱动应用范围广在关节驱动方面
, 。 路线一
: 。 , , , , , ; 缺点是, , , , , 。 
路线二
: 。 又分为三种方案
: ①传统电机驱动+力矩传感器。 : 结构简单, ; 缺点: 力矩伺服差, , 。 
②电机驱动+柔性软件
。 : 力矩精度高, , ; 缺点: 位置伺服差, 。 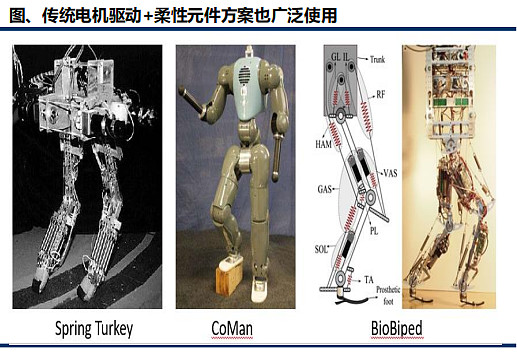
③电机直驱方案
。 : 力矩精度高, , ; 缺点: 电机需要特制, 。 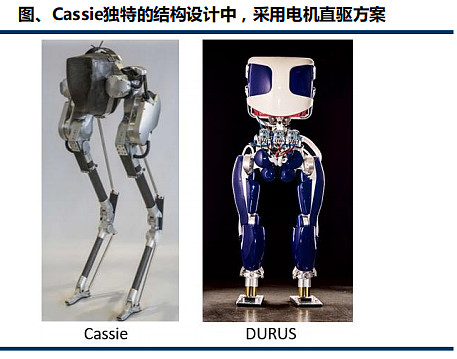
液压
、 , , , ; 液压驱动难度高, , , ; 气动驱动性能介于液压和电机直接, 。 工业机器人要求高精度
, 仿人机器人和工业机器人在硬件结构设计
、 、 。 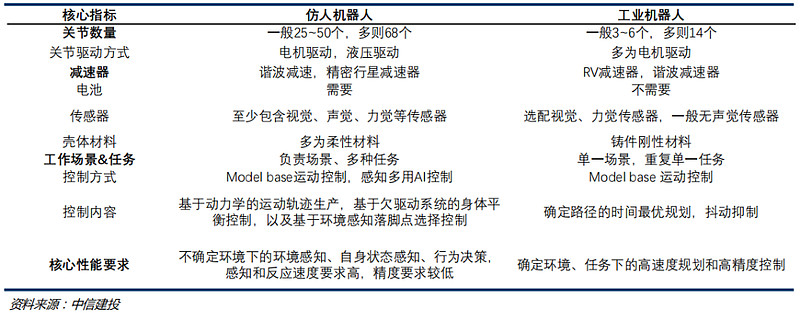
①仿人机器人关节/电机数量远高于工业机器人
, 。 仿人机器人在结构上更加复杂
, , , , 。 , 、 、 , , 。 ②减速器
: 仿人机器人需要控制自重, ; 工业机器人在减速器选择上面更广, , 。 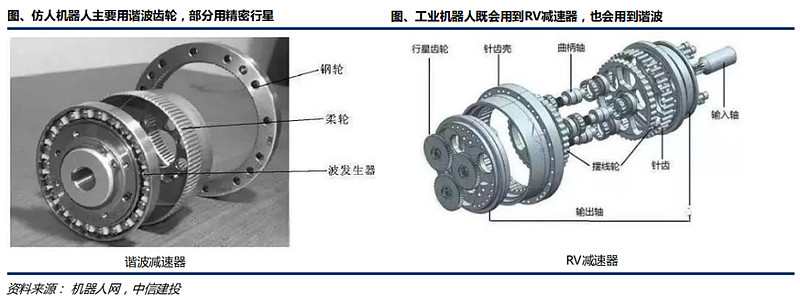
③仿人机器人视觉系统性能要求
、 。 仿人机器人视觉系统为标配
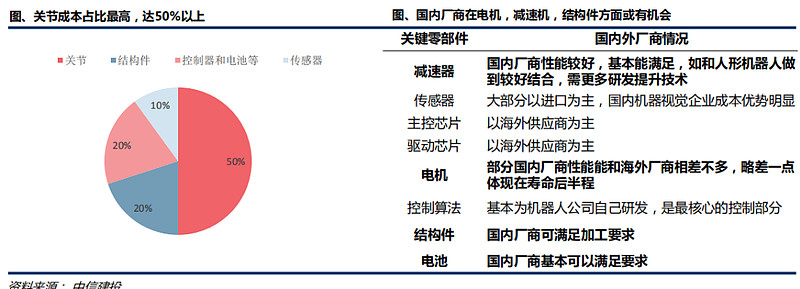
, , ( ) , , 。 , , , 。 中信建投认为
, 、 、 : 仿人机器人50%以上的成本来自于关节
, , , , 。 减速器方面
, , 。 结构件成本占比为20%左右
, , , , 。 
Tesla bot大规模量产后
, 、 、 仿人机器人最核心的优势是能够在复杂环境下完成多种任务
, , , 、 、 。 上游为核心软硬件
, 、 、 、 , 、 、 、 ; 中游则是人形机器人本体制造商
, 、 、 、 、 、 、 ; 下游目前还未有成熟的商业应用
, 、 、 。 目前芯片以海外为主
, , , 、 、 。 中信建投认为
, , , 、 , 。 其在报告中总结道
: 1
、 , 。 , , , 。 , , , ; 2
、 , , , , 。 , , , , ; 3. 结构件作为仿人机器人的
“ 骨骼” , , , , , 。 , , ; 4. 区别于工业机器人
, , 。 、 ; 5. 传感器是实现仿人机器人环境感知与交互功能的核心部件
, , 。 , , 、 、 , , 、 ; 6. 机器人壳体作为
“ 皮肤” , , , 、 、 , 当然
, , , 。 , , , 。 , , 。 本文观点主要来自于中信建投证券研报
《 : 赋予机器“ 生命” , 》 , : 朱玥、

 公安备案号 51010802001128号
公安备案号 51010802001128号