










-
人形机器人核心执行器全景解析
糖芯儿 / 01月21日 12:54 发布
当前人形机器人技术端加速演进,商业化进程全面提速,产业趋势明确。
特斯拉计划在1月底2024年第四季度业绩会上人形机器人Optimus的进度,新一代Gen3有望于一季度定型发布。此外,英伟达有望在3月GTC25大会上发布机器人领域布局更新。
根据马斯克最新新品发布及量产指引,预生产版本OptimusV1将在2025年开始限量供应,2025年底前将有数千个机器人在工厂使用;量产目标2025年几千台,2026年5-10万台,2027年有望再增加10倍。
从特斯拉Optimus产品价值量来看,执行器占到人形机器人主要零部件价值量一半以上,主要由丝杠、无框力矩电机、减速器、力传感器、空心杯电机及轴承等构成。
目前特斯拉机器人身体关节总共28个执行器,未来若机器人需要运动能力更强,执行器数量将进一步提升,带来更大的市场空间。
01
人形机器人执行器概览
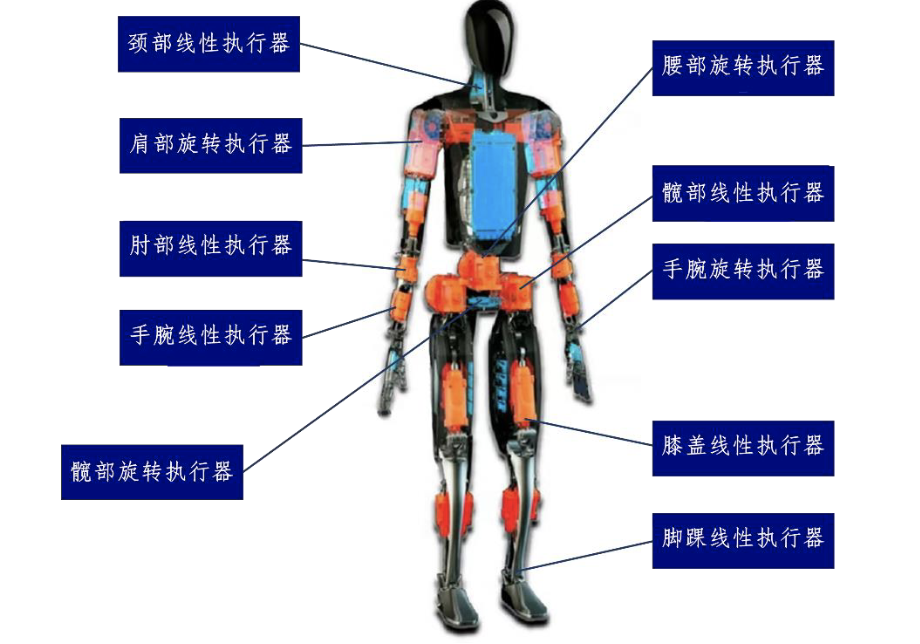
执行器又称为关节模组,是人形机器人硬件系统的关键部件,负责驱动和控制机器人各个关节和部件的运动,使其能够模拟人类的运动和行为。特斯拉人形机器人执行器分为旋转执行器和线性执行器2大类型6种规格。
两大执行器的共同点在于动力来源(无框力矩电机)、传感器(编码器、力矩传感器),不同之处在于传动机构分别是行星滚柱丝杠和减速器。
其中旋转执行器采用“电机+精密减速器”结构,线性执行器采用“电机+滚柱丝杠结构”。
执行器包括旋转执行器和线性执行器两大类:
 资料来源:特斯拉 AI Day
资料来源:特斯拉 AI Day02
线性执行器
线性执行器是将旋转运动转换为直线运动,或者直接产生直线运动的装置。主要用于人形机器人的腕、肘、膝和踝等关节,以及需要直线运动的部件,如手臂的伸展、腿部的移动等。
线性执行器将电机输出的旋转运动转化为“伸缩”式直线运动,主要结构包括电机(无框力矩电机)、传动部件(行星滚柱丝杠、轴承)、传感器(力/力矩传感器、编码器)。
其中,无框力矩电机提供动力,行星滚柱丝杠将旋转运动转换为直线运动,力传感器和编码器用于监测运动状态,驱动器负责控制电机的运行。
手臂的驱动方式主要通过行星滚柱丝杠作为主动力单元,丝杠伸出时带动输出端关节球头轴承向外移动,输出端关节球头轴承带动小臂主套筒做弯曲运动。
线性执行器结构图:
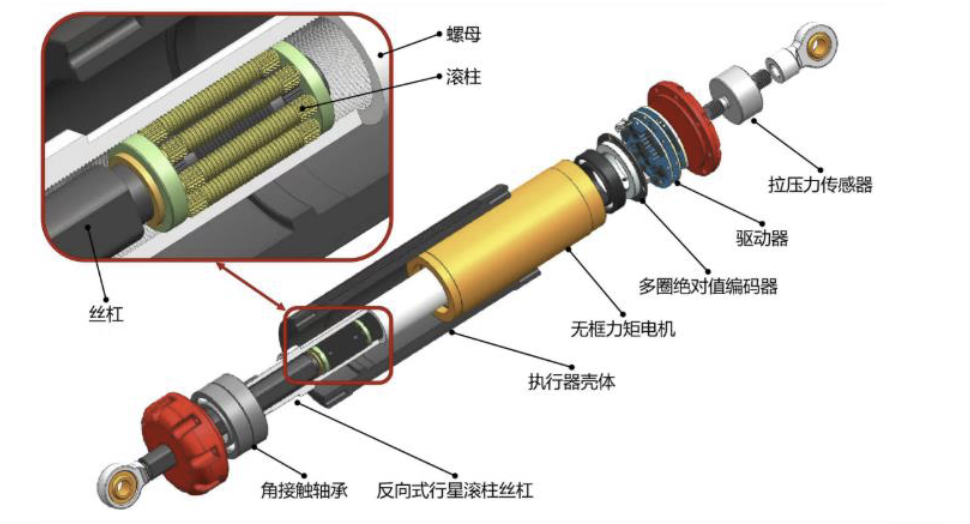 资料来源:新剑传动
资料来源:新剑传动03
旋转执行器
旋转执行器是让机器人的关节进行旋转运动的装置。主要用于人形机器人的肩、髋等关节,以及需要旋转运动的部件,如手臂的旋转、头部的转动等。
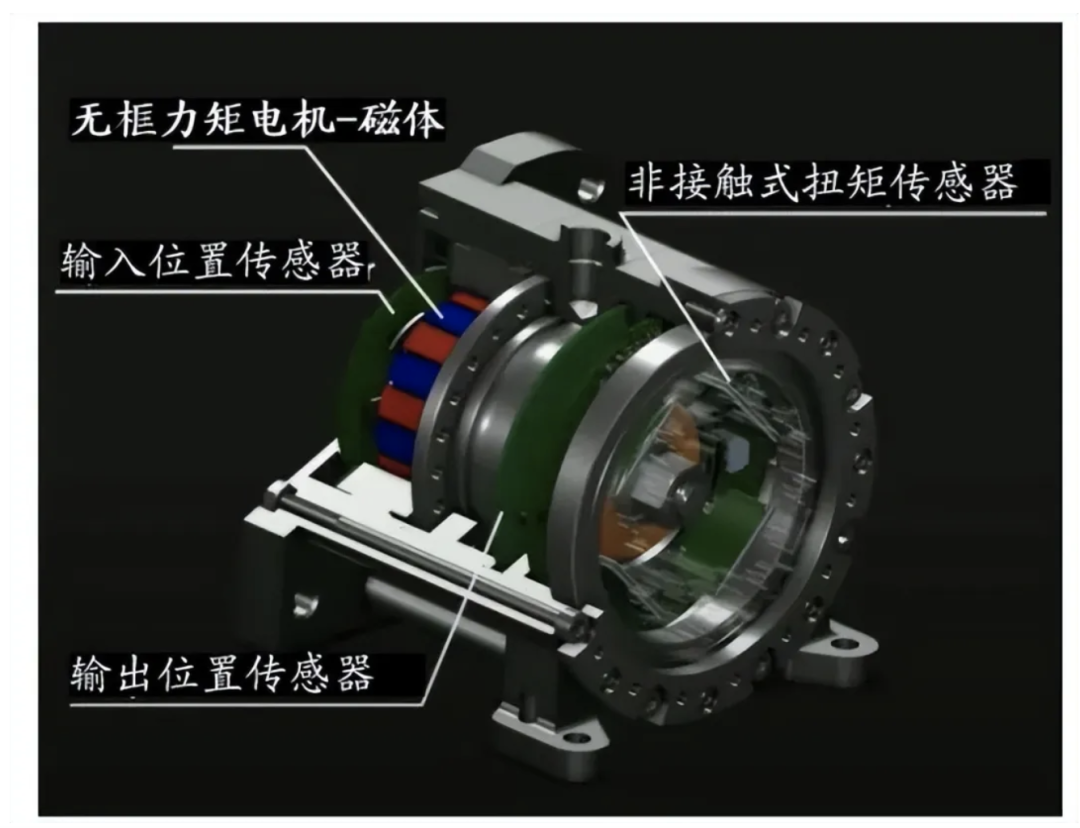
旋转执行器将电机输出由高速低扭转化为低速高扭的旋转运动,主要构成包括电机(无框力矩电机)、传动部件(谐波减速器、轴承)、传感器(力矩传感器、编码器)、驱动器。
无框力矩电机提供动力,谐波减速器用于降低转速、增大扭矩,力矩传感器和编码器用于监测运动状态,驱动器则负责控制电机的运行。
Maxon旋转执行器结构图:
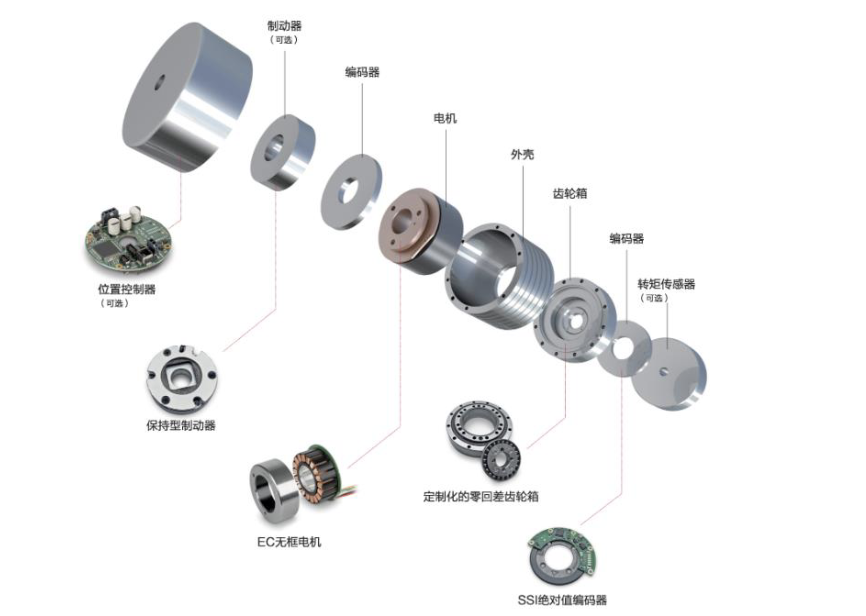 资料来源:Maxon
资料来源:Maxon04
人形机器人执行器核心零部件
人形机器人不同执行器零部件构成图示: 资料来源:特斯拉 AI day
资料来源:特斯拉 AI day电机
电机是人形机器人的动力输入来源,负责将电能转换为机械能,驱动机器人的关节和肢体进行精确运动。用于人形机器人的电机类型有无框力矩电机和空心杯电机等。
无框力矩电机常用于线性关节和旋转关节,特斯拉人形机器人Optimus14个线性执行器和14个旋转执行器中都使用了无框力矩电机。
无框电机是无框架式永磁电机,核心优势是输出力矩大、结构紧凑,散热性好,采用无框电机的机器通常效率更高、重量更轻。
由于无框力矩电机的中空结构便于走线,因此适用于集成度较高的人形机器人。
旋转关节中的无框力矩电机:
无框力矩电机目前存在较高的技术壁垒,需要一体化设计并集成到机器人关节内部,定制需求强,稳定量产难。
全球市场呈头部集中的格局,海外厂商科尔摩根、威腾斯坦、Maxon等是头部玩家。
我国无框电机行业尚处于起步阶段,市场参与者数量较少,国产替代空间广阔。国内头部厂商包括步科股份、雷赛智能等;主要布局厂商包括伟创电气、汇川技术、昊志机电、禾川科技、震裕科技等。
空心杯电机是人形机器人灵巧手末端执行器的核心零部件,是目前性能最优的电机方案之一。
其核心技术壁垒包括线圈设计、绕线工艺以及绕线设备。
全球市场中,瑞士Maxon、德国Faulhaber、瑞士Portescap等处于行业第一梯队,并已经大量申请空心杯电机相关的专利技术。
鸣志电器、鼎智科技(江苏雷利控股子公司),雷赛智能、禾川科技、兆威机电、拓邦股份等厂商是该环节国内头部厂商。
新进入者的技术积累较浅,难以达到人形机器人领域的高效率等要求。
丝杠
特斯拉机器人历次迭代最大的边际变化就是丝杠用量持续增加。国际上丝杠精度标准之一为JIS标准(日本、韩国和中国台湾等地广泛使用)。
根据JIS标准,丝杠的精度等级从C0到C10不等。综合人形机器人算法、传感能力及降本维度考虑,人形机器人丝杠精度需达到C5级。
除线性关节外,灵巧手也使用微型滚珠或者滚柱丝杠。
原先在灵巧手的研究中使用的主要是连杆传动、齿轮传动、带传动、线绳传动等。
目前出现了使用电机+微型丝杠的主动关节方案,后续有望进一步增加丝杠在人形机器人行业的应用空间。
行星滚柱丝杠在全球范围内应用有限,具备规模化量产能力的企业极少。
目前国内近百家人形机器人企业中,使用丝杠方案仅为个位数,渗透率有望大幅提升。
国内丝杠供应链国内替代头部厂商包括新剑传动、南京工艺等;主要布局厂商还包括双林股份、北特科技、恒立液压、震裕科技、五洲新春等。
特斯拉人形机器人Optimus的行星滚柱丝杠全球仅有两家供应商,分别是德国舍弗勒和新剑传动。2024年12月,新剑传动年产100万台人形机器人及汽车行星滚柱丝杠产业化项目开工,成为全球第一家公布大规模量产的企业。
南京工艺是国内少数具备行星滚柱丝杠大批量生产能力的企业之一,拥有近50年的技术积累,成功研制出中国第一套滚珠丝杠。
北特科技在汽车底盘零部件行业有经验积累,生产工艺与机器人用行星滚柱丝杠产品的生产工艺有较高的同源性。配合三花智控研发各型号丝杠零部件,已经试用于人形机器人执行器及汽车后轮转向,拟在江苏昆山投资18.5亿建设行星滚柱丝杠研发生产基地项目。
震裕科技已建成一条用于生产机器人线性关节核心组件行星滚柱丝杠的样品生产线,并正在打通中试线全自动生产及装配的工艺流程。计划建设完整的自动化中试生产线,预计每日产能可达100套行星滚柱丝杠,后期还可以根据需要拓展产能。
减速器
减速器是电机与转动装置之间的桥梁。
人形机器人用减速器可类比汽车变速箱,属于机器人的核心精密零部件之一。
特斯拉目前公开的Optimus全身有12个旋转关节,对应12台谐波减速器需求。
谐波减速器在人形机器人的作用主要体现在其高精度、高扭矩和小型化的特点上。
微型谐波减速器小型化优势突出,制造设备和工艺与常规产品不同,制造难度大,价格高。
全球减速器龙头哈默纳科已开发集成微型谐波减速器、无刷伺服电机、编码器于一体的微型执行器,应用于灵巧手上,单手指用量为2-3台。
新型行星减速器背隙可降至1弧分以下,有可能替代谐波减速器方案。
日本哈默纳科的谐波减速器与行星减速器技术领先,并开发出搭载微型谐波减速器的灵巧手,在减速器领域位居全球前列。
国内同时具备行星和谐波减速器制造能力、通过滚插路线能够实现大规模量产降本的供应链企业代表厂商包括绿的谐波、中大力德、丰立智能等。
传感器
传感器是人形机器人感知系统重要元器件,目前主要有力/力矩传感器、触觉传感器、视觉传感器、编码器几大方向。
力矩传感器用于实时监测执行器的运行状态,为控制系统提供关键信息,确保机器人的动作精度。
六维力传感器是维度最高的力觉传感器,能够提供最高维度的力觉信息,并给出最为全面和精准的力觉数据。
六维力传感器目前成本和壁垒都较高,可以批量化供应的企业较少。未来整机厂可能通过算法等方式减少使用量,降本后有望打开空间。
六维力传感器相关布局厂商包括宇立仪器、坤维科技、鑫精诚、蓝点触控、昊志机电、柯力传感、东华测试、海伯森、瑞尔特等。
编码器是测量电机位移和角度的传感器,通常安装于人形机器人关节处以及电机轴上,可以采集关节速度。
编码器用量大,价值量高,其生产难点是需要用到高精度加工设备、加工材料,且组装工艺复杂,特别在高精度编码器领域,基本被外资垄断。
国产厂商雷赛智能、锐鹰传感、昊志机电、已经实现编码器的部分外售;汇川技术、昊志机电、雷赛智能和步科股份所产编码器已配套电机。
人形机器人对灵巧手要求高,触觉传感器是重要方向。触觉传感器目前处于发展早期,当前市场主要以Canatu、Sensel、Flexpoint等海外企业为主。柔性触觉传感器相关布局厂商包括汉威科技、申昊科技、帕西尼感知、柯力传感、苏试试验、中科纳芯、墨现科技、康斯特、力感科技和钛深科技等。
机器视觉是人工智能最重要的前沿技术之一,其底层逻辑在于为机器植入“人眼与大脑”,使机器可代替人工来对被检测物品做测量与判断。国内机器视觉行业整体的品牌竞争力有望持续提升。以海康威视、大恒科技、天准科技、凌云光为代表的中国本土机器视觉厂商已在核心零部件技术与独立软件算法等方面进行大力投入;奥比中光在中国服务机器人3D视觉传感器领域市占率超过70%;奥普特拥有完整的机器视觉核心软硬件产品。
控制装置
控制器是执行器的“大脑”,负责接收输入信号,通过算法处理,输出控制信号,驱动电机运转。常见的控制装置包括伺服驱动器、微控制器等。
目前人形机器人厂商多为自行采购上游零件,集成以实现对自家机器人的适配,控制算法和控制器的设计是机器人运动控制的核心和壁垒,可能会延续工业机器人厂商负责本体制造+控制器部分的产业链分工。
该环节国内主要参与厂商包括汇川技术、新时达、英威腾、雷赛智能、埃夫特、新松机器人、埃斯顿等。
轴承
轴承主要应用于旋转关节执行器关节连接(包括与减速器、电机等配合使用)的轴承包括角接触轴承、交叉滚子轴承等;谐波减速器需要用到柔性轴承、滚针轴承等。
国内高端轴承市场基本被全球八大轴承企业垄断,中国企业正在加速突围。从轴承市场竞争格局看,德国舍弗勒主要生产滚针轴承及液压顶杆等,日本不二越主要生产中小型球轴承,NSK主要生产小型低噪音轴承,TIMKEN主要生产英制圆锥滚子轴承。
国内厂商五洲新春已成功研发机器人谐波减速器柔性薄壁轴承等,光洋股份自研机器人减速器用交叉滚子轴承表面防腐镀黑铬技术,国机精工集中于高中端产品,人本股份、龙溪股份、长盛轴承等也在各自技术领域有所发展。长盛轴承为宇树科技提供关节轴承和滑动轴承等核心零部件,并联合开发丝杠项目,在特斯拉机器人产业链中送样也有积极进展。
目前国内已有三花智控、拓普集团在机器人执行器领域具备领先优势。随着人形机器人走向量产,产业链各环节厂商有望加速迎来国产替代机遇。乐晴智库精选

 公安备案号 51010802001128号
公安备案号 51010802001128号